Experimentální systém robotického exoskeletu kostry dolních končetin ESRE-OMI¶
Robotické exoskelety dolních končetin jsou zdravotnické prostředky, určené výrobcem pro použití u člověka za účelem mírnění nebo kompenzace poranění nebo zdravotního postižení, jímž je těžká až úplná ztráta hybnosti dolních končetin, jejíž příčinou je nesprávná funkce mozku, míchy, míšních kořenů, periferních nervů a svalů anebo v rámci rehabilitace po operacích kloubů kolene a kyčle, případně v rámci rekonvalescence chodidel.
ESRE-OMI se řadí do 1. generace zdravotnických prostředků v kategorii robotických exoskeletů dolních končetin. Slouží k výzkumu a vývoji metod a systémů nestacionární roboticky asistované chůzi v prostoru pro léčebnou rehabilitaci v interiéru a lehkém exteriéru za příznivých klimatických podmínek, pod vedením anebo pouze dohledem terapeuta, experimentátora nebo za asistence seznámené osoby, po rovině a případně po schodech a s oporou horních končetin. Použití je možné i v domácím prostředí, s očekávaným naplněním cílů terapie nebo experimentu, jimiž jsou snížení spasticity (pozor na kontraindikace, viz nekontrolovaná spasticita), zvětšení rozsahu pohybu a zlepšení stability trupu, obnova chůzových vzorů, remodelace neuronálních okruhů v míše a případně v mozku, zachování víry v samostatnou chůzi, snížení deprese. ESRE-OMI není vhodné používání bez asistence.
Oblasti využití ESRE-OMI¶
Asistivní/kompenzační chůzový exoskelet exoskelet ESRE-OMI je experimntální vědecký systém zdravotnického prostředku určený pro aplikaci na probandech a to především pro výzkum 2. a 3. generace exoskeltů a vývoj:- nových řídicích metod robotických exoskeletů dolních končetin;
- metod kontroly rovnováhy k omezení rizika pádu;
- možnosti chůze vlastní silou (zbytková síla končetiny, hemipostižení);
- chůze bez opory horních končetin pro domácí použití;
- metody detekce překážek při chůzi vzad či úkroku stranou;
- konstrukcí pružného kroku;
- komplexních algoritmů a vícestupňových návrhů pro stoj z lehu na podlaze;
- robotické rehabilitace chůze u probandů s míšní lézí a CMP;
- robotické rehabilitace chůze u probandů po operaci kloubů kolene a kyčle, případně v rámci rekonvalescence chodidel;
- motorizovaných ortéz dolních končetin pro chůzi;
- ortéza dolních končetin ovládaných zevní silou;
- bateriových bionických exoskeletů.
Popis ESRE-OMI¶
ESRE-OMI je částečná ortéza pokrývající kloub kolene a kotníku. Aktuátor dodává energii pohybu kolene. Ortéza je s trupem spojena v sedací oblasti pomocí úvazku. Kontrolní elektronika a akumulátory jsou umístěny v malém batohu.
Robotický exoskelet dolních končetin ESRE-OMI je nestacionární telemedicínský systém vyznačující se:- fixačním úvazkem pro upevnění exoskeletu v oblasti pletenece dolní končetiny (cingulum membri inferioris) a pasu;
- fixačními popruhy pro upevnění exoskeletu v oblasti kosti stehenní (femur);
- fixačními popruhy pro upevnění exoskeletu v oblasti kostí bérce (ossa cruris);
- fixačním lůžkem pro upevnění exoskeletu v oblasti kostí kosti nohy (ossa pedis);
- bateriovým napájecím zdrojem pro funkci exoskeletu bez primárního napájení po dobu až několika hodin;
- nastavitelností parametrů konstrukce: délka bérce, stehna, šíře pánve, rozsahy flexe-extenze kolene, korekce délky končetiny;
- nastavitelným stupněm volnosti DOFAG umožňující flexi a extenzi kolene a umožňuje fixaci kolene v konkrétním úhlu;
- pomocným aktuátorem AAG v oblasti kolenního kloubu o síle 70 Nm, který asistuje dvojhlavý sval stehenní, sval pološlašitý, sval poloblanitý při flexi a čtyřhlavý sval stehení při extenzi;
- nastavení rozsahu pohybu DOFAG bránící hypertenzi kolene;
- nastavitelným stupněm volnosti hezelního kloubu DOFAT umožňující případně fixující plantární a dorzální flexi,
- fixací pronace a supinace DOFAT;
- fixací bérce znemožňující pohyby zevní a vnitřní rotace nohy;
- fixací dolního kloubu zánártního a pohybů everze a inverze.
Podmínky užívání ESRE-OMI¶
Možné současné zdravotní indikace probandů nestacionárního robotického exoskeletu ESRE-OMI:- těžké až úplné postižení hybnosti dolních končetin při zachovalé dobré funkci horních končetin;
- aktivní uživatel mechanického vozíku, jenž zvládá samostatně přesuny na vozík a z vozíku, včetně ostatních přesunů vsedě;
- pacienti zvládající stoj, případně s použitím ortéz s oporou o 2 FH nebo bradla, nebo alespoň tolerující vertikalizaci do stoje na stavěcím stole (stojanu);
- pacient má dobrou kloubní hybnost v kyčelních, kolenních, ramenních a hlezenních kloubech.
- Omezený rozsah pohybu, který by bránil probandovi k dosažení normálního, recipročního vzoru chůze nebo by omezoval probanda zvládat změny poloh ze sedu do stoje a zpět
- Snížená svalová síla horních končetin, která by snižovala schopnost udržovat rovnováhu a schopnost používání berlí anebo chodítka
- Nestabilita páteře (nebo používání spinální ortézy, pokud lékař nerozhodl jinak)
- Nevyřešená/nezaléčená hluboká žilní trombóza
- Snížená tolerance stoje kvůli ortostatické hypotenzi
- Významná osteoporóza, jež brání bezpečnému postavení nebo která může zvýšit riziko zlomenin způsobené tím, že pacient stojí nebo chodí
- Nekontrolovaná spasticita
- Nekontrolovaná autonomní dysreflexe (AD)
- Otázky integrity kůže na kontaktních plochách se zařízením nebo na površích, které by nedovolovaly/neumožňovaly pacientovi sedět
- Rozdíl v délce stehen větší než 1,3 cm nebo bérců větší než 1,9 cm
- Kognitivní postižení ovlivňující plánování pohybu anebo impulsivitu
- Těhotenství
- Kolostomie
- Omezený rozsah pohybu v dolních končetinách nebo ramenou
- Zahojený vřed nad křížovou kostí s tenkou, křehkou pokožkou
- Nedávná historie nekontrolované ortostázy – ortostatického kolapsu
- Aktivní heterotopické osifikace, dysplazie kyčelního kloubu nebo abnormality osy kyčelního kloubu
- Rozdíly v délce dolních končetin a/nebo kostní abnormality, které by bránily bezpečnému použití
Technická specifikace ESRE-OMI¶
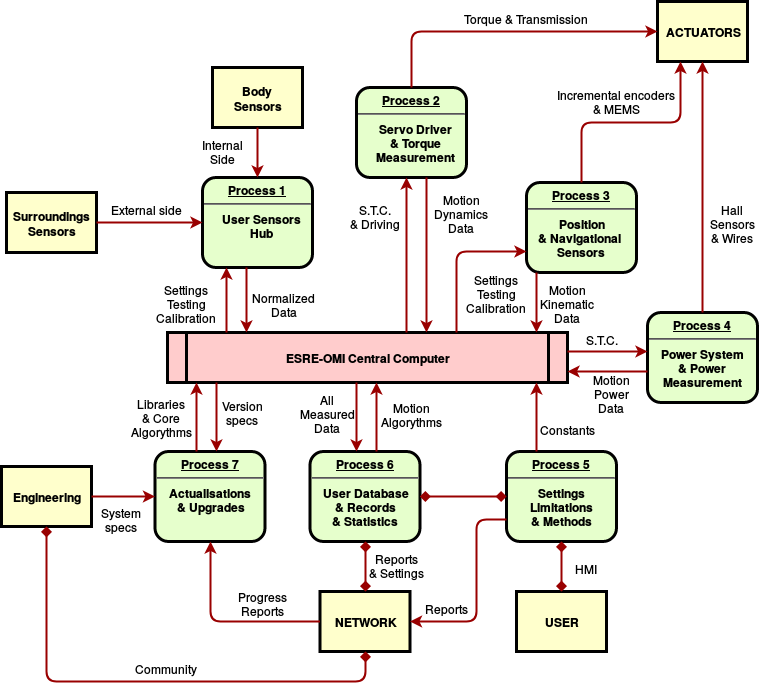
Řídicí jednotka PAC-X je vybavena firmwarem AMMI-DAM-3D, který multiplikačně komunikuje jak s PC (libovolný OS) tak s mobilními zařízeními s OS Android. AMMI-DAM-3D je ovládán a odesílá data skrze Wi-Fi (IEE802.11) a TCP port (IEE802.3) a skrze RS-232 a USB 2.0 pomocí jednoduchých příkazů a sdělení anebo skrze SD kartu na kterou ukládá záznamy dat a může být konfigurován.
Zařízení je kompatibilní se SW Matlab. Prokyber poskytuje SW v podobě skriptů a funkcí pro komunikaci se zařízením, pro vizualizaci a předzpracování dat. SW umožňuje snadný export dat do csv souboru pro další zpracování.
| TABULKA TECHNICKÝCH SPECIFIKACÍ | |
|---|---|
| Označení (obchodní/typové) | Diferenční/absolutní 3D magnetometr / ESRE-OMI |
| Výrobce | prokyber s.r.o. |
| PARAMETR | HODNOTA PARAMETRU |
| Typ aktuátoru AAG | 2-fázový krokový motor |
| Příruba/pouzdro aktuátoru AAG | NEMA34 86×86×65 mm |
| Moment aktuátoru AAG | 70 Nm |
| Úhlová rychlost aktuátoru AAG | 0 až 0,79 rad/s (45 °/s) |
| Nastavení kroku aktuátoru AAG | 1,75 mrad (6') |
| Parametry převodovky AAG | 3Nm@200RPM/79,58@7,54RPM |
| Počet a typ kinematických jednotek | 3x MEMU 3/3/3 |
| Měřené veličiny MEMU | translační pohyb (akcelerace) |
| rotační pohyb (úhel) | |
| natočení v mag. poli | |
| Chyba měření MEMU | < 5 % |
| Rozsahy měření rotace MEMU | ± 250, 500, 1000, 2000 °/s |
| Rozsahy měření akcelerace MEMU | ± 2, ± 4, ± 8, ± 16 g |
| Rozsah měření mag. pole MEMU | ± 4800 uT |
| Frekvence měření MEMU | 100 Hz |
| Rozlišení snímačů MEMU | 14 bit |
| Synchronizace snímačů MEMU | integrovaný RTC |
| Počet a typ dynamických jednotek | 2x tenzometrický snímač (SG) |
| Měřené veličiny SG | tah N |
| tlak N | |
| Max. zatížení SG (RCmax) | 200 kg (1962 N) |
| Absolutní chyba měření SG | ± 0.0100 % |
| Pohyb nulové hodnoty SG | ± 0.0083 % |
| Chyba excentrického zatížení SG | ± 0.0024 % |
| Frekvence měření SG | 100 Hz |
| Rozlišení snímačů SG | 12 bit |
| Synchronizace snímačů SG | integrovaný RTC |
| Tělo snímače SG | anodizovaný hliník |
| NTEP/OIML třída SG | C6 |
| Počet a typ tlakových jednotek | 4x PET film pressure sensor (PS) |
| Měřená veličina PS | tlaková síla N |
| Max. měřená zatěž PS (RCmax) | 10 kg (1962 N) |
| Absolutní chyba měření PS | ± 12 % |
| Frekvence měření PS | 100 Hz |
| Rozlišení snímačů PS | 12 bit |
| Synchronizace snímačů PS | integrovaný RTC |
| Tělo snímače PS | Polymethylmethakrylát |
| Dodatečná synchronizace | TTL/ADC |
| Komunikační rozhraní | metalické RS-232/USB |
| Wi-Fi | |
| Micro SD Card | |
| OS | Linux, Windows, Android |
| Vývojové rozhraní | Matlab |
| Výstupní formát dat | CSV (MS Excel) |
| Formát dat měření | 3x XYZ zrychlení |
| 3x XYZ úhel | |
| 3x XYZ natočení v m. p. | |
| 4x tlak/zatížení | |
| Stupeň krytí | IP64 podle EN 60529 |
| Provozní teplota | –10 to +40 °C |
| Hmotnost | < 5 kg (kapacita zdroje) |
| Napájecí napětí | 5 V DC |
| Napájení | powerbanka / adaptér USB |
| Interní zdroj napájení | set Li-Ion akumulátorů |
| Konfigurace exoskeletu pravé končetiy (dextra) OMI-D | 1x PAC-X_ver.4 |
| 3x MEMU | |
| 2x SG + zesilovače | |
| 4x PS + zesilovače | |
| 1x aktuátor + ovladač | |
| 1x Wi-Fi + anténa | |
| Konfigurace exoskeletu levé končetiy (sinistra) OMI-S | 1x PAC-X_ver.4 |
| 3x MEMU | |
| 2x SG + zesilovače | |
| 4x PS + zesilovače | |
| 1x aktuátor + ovladač | |
| 1x Wi-Fi + anténa | |
Cena, jakost a dodací termín¶
| Objednací číslo | Název | Záruka | Dodání | DPH | CZK/kus bez DPH | CZK s DPH |
| ESRE-OMI-v1 | Experimentální systém robotického exoskeletu | 24 měsíců | 6 týdnů | 21 | 450 450 Kč | 545 044 Kč |
Po dobu 24 měsíců garantujeme jakost produktu, tedy stálý stupeň plnění potřeb nebo očekávání, které jsou závazné, obecně se předpokládají nebo jsou jinak stanoveny. Jakost je kontrolována při převzetí produktu a na požádání zákazníka na provozovně prodávajícího.
Produkt dodáme do 2 týdnů od data závazné objednávky. Produkt je možné konfigurovat a upravit jej podle potřeb zákazníka. Konkrétní úpravy a kvality musí být předem projednány.
Cena produktu se může měnit v závislosti na objednaném množství, nebo v závislosti na požadovaných úpravách.
Srovnání trhu¶
Systém ReWalk od firmy ReWalk Robotics v hodnotě 90 000 euro- Rozhovor s Yishai Potack, obchodním ředitelem firmy ReWalk Robotics
- Článek na Exoskeleton Report
- kontakt výrobce
- cena za měsíční pronájem je 2 000 $ a prodejní cena je 96 000 $
- Článek na Exoskeleton Report
- kontakt výrobce
- systém není v prodeji pro koncového uživatele
- Alternativní systém eLEGS stojí 100 000 $
- Srovnávací článek na Exoskeleton Report uvádí cenu systémů nad 150 000 $
- kontakt výrobce
Studijní materiály¶
Seznam doporučené studijní literatury pro obsluhující personál, experimentátory, seznámené osoby, terapeuty.
- MOSES, K. Nestacionární robotické exoskelety dolních končetin v ČR. Rehabilitační ústav Kladruby. [ONLINE] http://www.rehabilitace.cz/pro-odbornou-verejnost/odborna-cinnost/clanky-a-odborne-publikace/nestacionarni-roboticke-exoskelety-dolnich-koncetin-v-cr/
- 1. A Study Testing Safety and Tolerance of the re-Walk Exoskeleton Suit (rW). ClinicalTrials.gov Identifier: NCT00627107.
- 2. The re-Walk Exoskeletal Walking System for Persons with Paraplegia. James J, Peters VA. Medical Center, Bronx, NY, Clinical Trails.gov Identifier: NCT01454570.
- 3. Safety and Performance Evaluation of re-Walk reciprocating Gait Orthosis (rGO). ClinicalTrials.gov Identifier: NCT01251549.
- http://www.csnn.eu/ceska-slovenska-neurologie-clanek/roboticka-rehabilitace-chuze-57772?confirm_rules=1
- https://www.stargen-eu.cz/rehabilitace/nacvik-chuze/ekso-bionics/
- https://www.svethardware.cz/roboticky-exoskeleton-od-toyoty-pomuze-lidem-chodit/44271
- https://www.prolekare.cz/casopisy/ceska-slovenska-neurologie/2016-2-9/roboticka-rehabilitace-chuze-57772
- https://slideplayer.cz/slide/13500226/
- https://www.wikiskripta.eu/w/Pasivn%C3%AD_pohyby_doln%C3%ADch_kon%C4%8Detin
- http://www.szskm.cz/soma/1B_pohyby.jpg
- https://ftvs.cuni.cz/FTVS-1373.html
- http://www.nabla.cz/obsah/biologie/kapitoly/biologie-cloveka/kostra-dolni-koncetiny.php
- http://www.kylesconverter.com/frequency/radians-per-second-to-revolutions-per-minute
{kind=link}
Aktualizováno uživatelem Jednatel J.H. před téměř 7 roky(ů) · 11 revizí